Physical Intelligence in Robotics: Bridging AI and the Physical World
Physical Intelligence (PI) in the context of robotics refers to the integration of advanced AI systems with the ability to perceive, reason about, and interact with the physical world. This concept emphasizes embodied intelligence, where robots learn from diverse real-world interactions and adapt to dynamic environments, much like humans.
It’s the next step in the evolution of robotics, like in the nature the step from the australopithecus to the homo habilis.
Its importance lies in addressing a critical limitation of traditional AI systems: the gap between digital cognition and embodied action.
Core Princibles of Physical Intelligence
Physical Intelligence bridges digital AI capabilities with physical execution. These principles collectively redefine what machines can achieve, moving beyond rigid automation to create systems that are flexible, intuitive, and deeply integrated into human life. One of the core principles that distinguish it from traditional artificial intelligence and robotics is the idea of embodied cognition.
Embodied Cognition: the the notion that intelligence is not confined to abstract resoning but emerges from the dynamic interplay between system and its physical enviroment.
Embodied Learning and interaction
The first core principle of Physical Intelligence is embodied learning, which emphasizes that intelligence arises from direct interaction with the physical world. Unlike traditional AI models that rely on static datasets, intelligent systems learn by doing. This hands-on approach mirrors how humans develop skills -through trial, error and sensory feedback.
Adaptability and Generalization
A second key principle is adaptability, the ability to apply learned skills to novel situations. Traditional robots are often limited to pre-programmed tasks in controlled settings. This adaptability is achieved through techinques such as flow matching, which allows robots to generate continuos, high frequency actions and adjust them on the fly. This principle is crucial for scaling robotics beyond factory floors into real-world settings like homes, hospitals, and public spaces. It prioritize Real-Time Feedback and Continuos Learning, essential in dynamic environments.
Technical Foundation
Core concepts behind Physical Intelligence include: Foundation Models for Robotics, Vision-Language Models (VLMs), Multi-modal Data, Token-based Operations, Pre-training and Fine-tuning, physics-based Simulations. These technologies enable robots to perceive and interact with the world in a more human-like way, combining vision, language, and physical action.
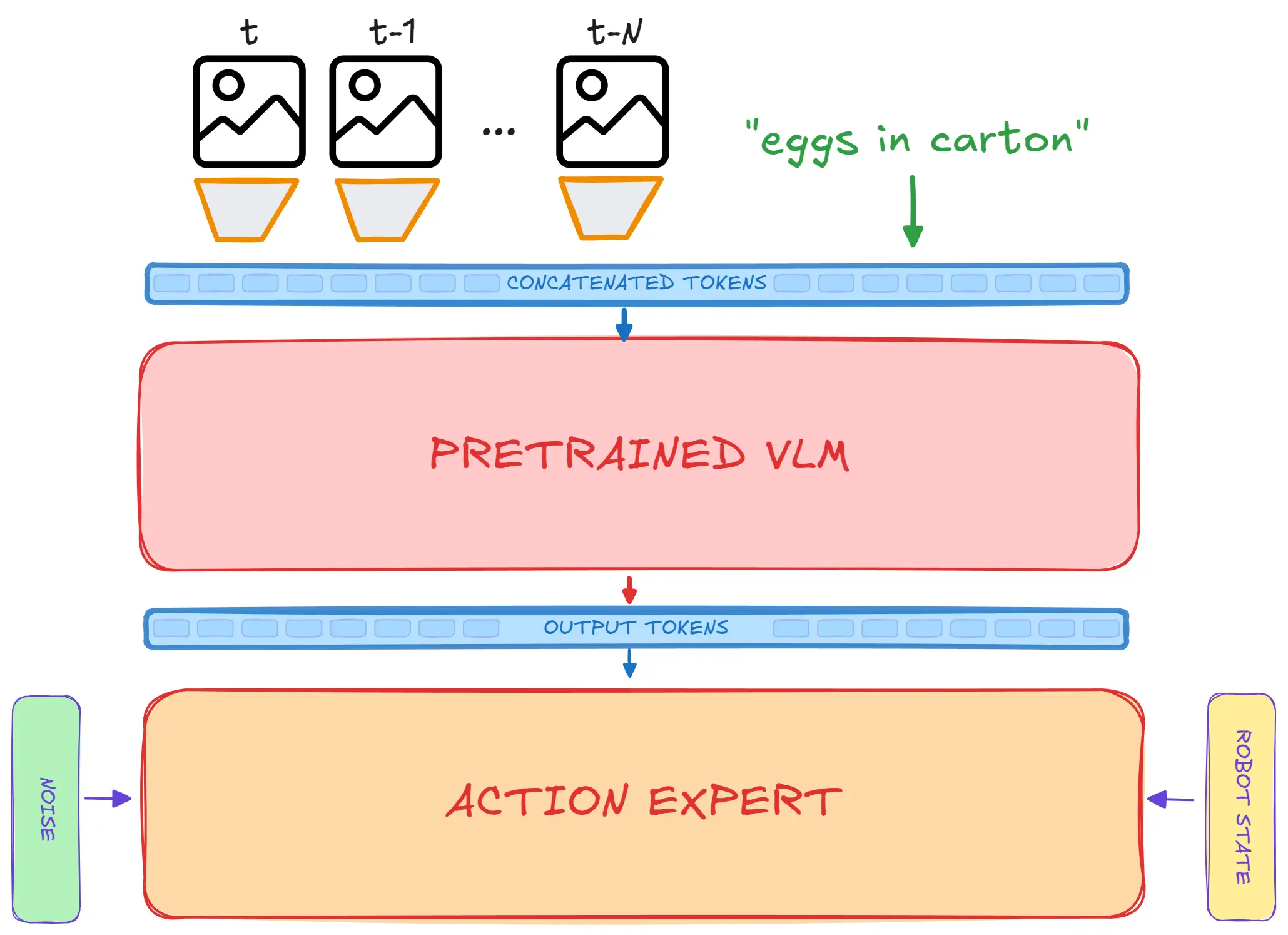
Vision-Language-Action Models (VLAs) are a key technology in Physical Intelligence, enabling robots to understand and execute complex tasks based on visual and linguistic input. This is similar to pi0 model.
Foundation Models for Robotics
Foundation models are large AI models pre-trained on vast datasets. These models provide a generalized understanding of the world, enabling robots to learn from fewer examples and generalize actions more effectively than traditional AI approaches.
Vision-Language Models (VLMs)
These models are trained on both visual and linguistic data, enabling robots to process natural language commands and interpret complex visual information from the real world. They represent the state-of-the-art foundation for developing physical intelligence in robotics.
Token Based Operations
Token-based operations are a key concept in modern AI systems, where information is processed in discrete tokens rather than continuous signals. This approach enables robots to reason about complex tasks and interactions in a more structured and interpretable way.
Data-driven Learning and Simulation
Physical Intelligence relies on large-scale, multi-modal datasets to train robots on diverse tasks and environments. These datasets are used to pre-train models and fine-tune them for specific applications. Physics-based simulations are also crucial for training robots in virtual environments before deploying them in the real world.
References
- NVIDIA Blog (2024): Three Computers are Better Than One for Robotics
- Physical Intelligence Company Blog (2024): PI0